Agent behavior control
AgentController can be controlled from State Machine, Behaviour Tree, and C# scripts.
Move
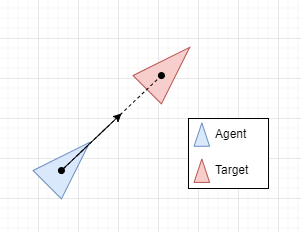
Move towards the target position.
The difference from Pursuit is that it moves toward the back (where it was) of the target.
- State machine behaviour
- Behaviour tree action
- Method
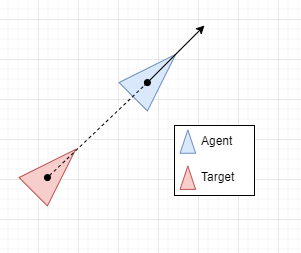
Pursuit
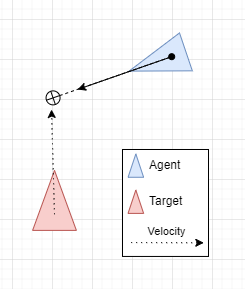
Moves toward the predicted position considering the moving speed of the target.
The difference from Move is that it moves so that it stands in front of the target's destination.
The destination prediction of the target is done by referring to MovingEntity.
- State machine behaviour
- Behaviour tree action
- Method
Interpose
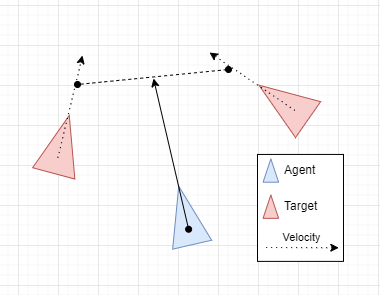
Move toward a position that interrupts between the two objects, taking into account the moving speed of the two objects.
The destination prediction of the target is done by referring to MovingEntity.
- State machine behaviour
- Behaviour tree action
- Method
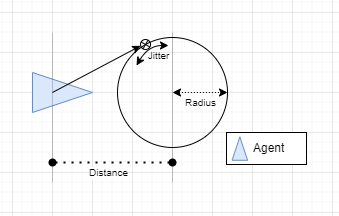
MoveToRandomPosition
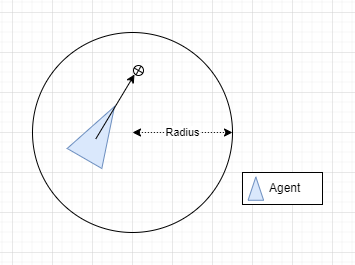
Moves toward a random position within a radius centered on the specified position.
The difference from Wander is that the range of action is limited within the radius of the circle.
- State machine behaviour
- Behaviour tree action
- Method
Wander
Moves from the current orientation to a random direction within the specified range.
The difference from MoveToRandomPosition is that you can move without any restrictions on the range of action.
- State machine behaviour
- Behaviour tree action
- Method
MoveOnWaypoint
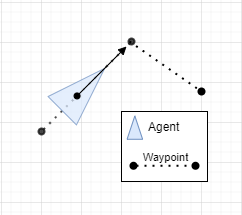
Move along the Waypoint.
- State machine behaviour
- Behaviour tree action
Escape
Move away from the target position. The difference from Evade is that it only moves away from the target.
If you are driven to a corner near the wall, turn it back to prevent it from getting hooked.
- State machine behaviour
- Behaviour tree action
- Method
Evade
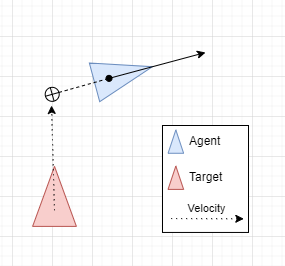
Move away from the predicted position considering the speed of the target and your own speed. The difference from Escape is that a steep angle change is likely to occur when the target movement direction is not on the vector to the agent.
The destination prediction of the target is done by referring to MovingEntity.
If you are driven to a corner near the wall, turn it back to prevent it from getting hooked.
- State machine behaviour
- Behaviour tree action
- Method
Hide
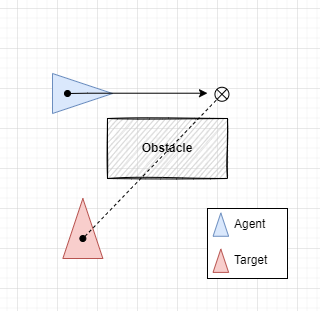
Move to a position where an obstacle is caught between the target position and your position.
Treats objects with the NavMeshObstacle component and objects with the NavMeshAgent component as obstacles.
The more obstacles there are, the heavier the load will be when searching for hidden obstacles, so be careful when reviewing the movement frequency and search method specifications.
- State machine behaviour
- Behaviour tree action
- Method
Warp
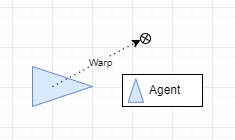
Instantly move to the specified position.
- State machine behaviour
- Behaviour tree action
- Method
LookAt
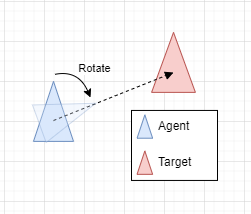
It will rotate on the spot toward the specified position.
- State machine behaviour
- Behaviour tree action
- Method
Stop
The move will stop.
- State machine behaviour
- Behaviour tree action
- Method